





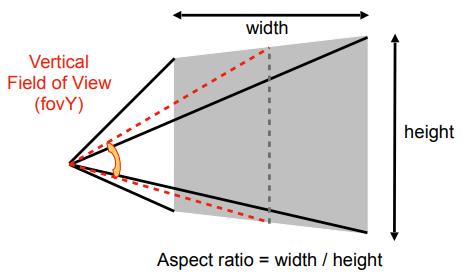
视锥
定义
宽度:\(width\)
高度:\(height\)
近平面:\(zNear\)
远平面:\(zFar\)
垂直可视角:长方形上下中点与相机连线的角度,\(fovY\)(Vertical Field of View)
宽高比:\(aspect\)
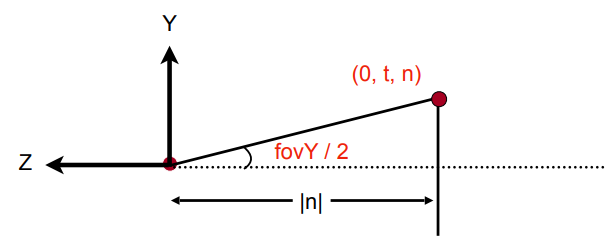
视锥体转换到视景体
需要计算出视景体的l,r,t,b,n,f信息
由于在此之前的视图变换,视景体n、f平面的中心就在Z轴上,而视锥体的近平面和远平面就是视景体的n,f。
视锥体参数和视景体存在以下关系:
\(\tan \frac{\text {fov } Y}{2}=\frac{t}{|n|}\)
\(\text{aspect}=\frac{r}{t}\)
所以:
\(n=zNear\)
\(f=zFar\)
\(t=tan(\frac{fovY}{2} )\times n\)
\(b=-t\)
\(r=aspect\times t\)
\(l=-r\)
光栅化
屏幕
二维数组
数组大小:分辨率
典型的光栅显示器
光栅化:在屏幕上绘图
屏幕坐标系
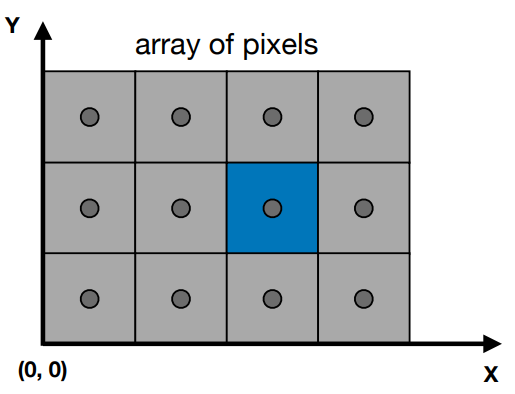
屏幕的左下角为原点
蓝色像素为 \((2,1)\)
用像素的左下角来表示像素,像素 \((x,y)\) 的中心在 \((x+0.5,y+0.5)\)
所有的像素坐标从 \((0,0)\) 到 \((width-1,height-1)\)
整个屏幕会覆盖 \((0,0)\) 到 \((width,height)\)
视口变换
将正交投影显示到屏幕
1.忽略z坐标
2.将\([-1,1]^2\)拉伸到\([0,width]\times[0,height]\)
\(
M_{\text {viewport }}=
\begin{bmatrix}
\frac{{ width }}{2} & 0 & 0 & \frac{{ width }}{2} \\
0 & \frac{{ height }}{2} & 0 & \frac{{ height }}{2} \\
0 & 0 & 1 & 0 \\
0 & 0 & 0 & 1
\end{bmatrix}
\)
光栅化
采样
采样就是获取每个点的函数值
采样是对函数的离散化
for (int x = 0; x < xmax; ++x)
output[x] = f(x); 光栅化就是2D的采样
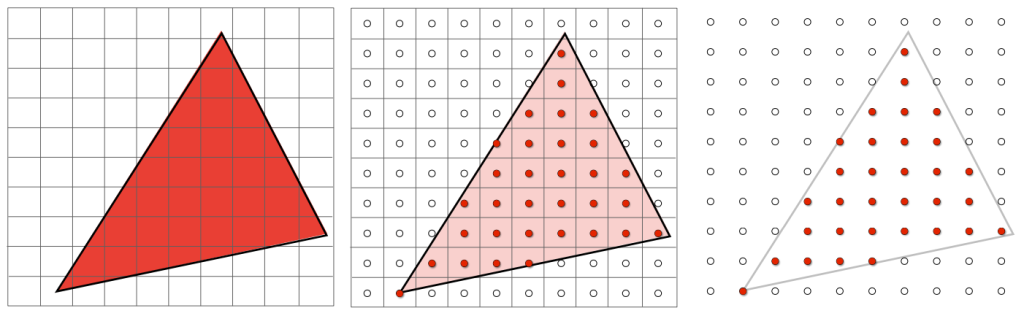
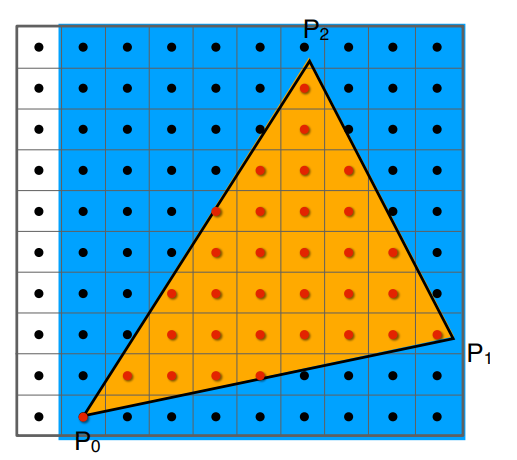
光栅化
判断屏幕上的像素是否在三角形内部
 \(
\(\text { inside }(t, x, y) \begin{cases}1 & \text { Point }(x, y) \text { in triangle } t \\ 0 & \text { otherwise }\end{cases}
\)
光栅化=对2D指示器函数进行采样
for (int x = 0; x < xmax; ++x)
for (int y = 0; y < ymax; ++y)
image[x][y] = inside(tri,
x + 0.5,
y + 0.5); inside函数:利用叉乘判断像素点的中心是否在三角形内部

优化
原本是判断屏幕上所有的像素是否在三角形内部,可以使用包围盒来只判断三角形周围的像素。
Comments | NOTHING